Detalle del proyecto Biomimetic Technologies for Soft-bodied Robots – NYT – 14-04-2007
El País
Robots que reproducen los movimientos de la naturaleza
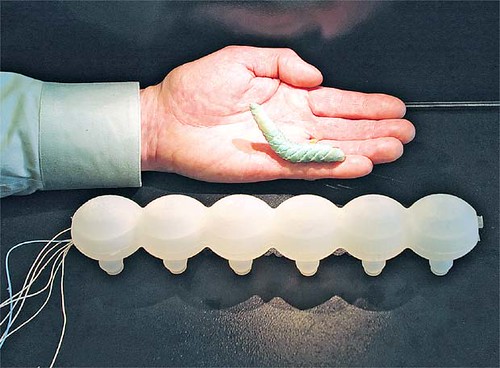
En la Tufts University un equipo multidisciplinar de investigadores busca darle un enfoque más blando a los robots. El robot yace diseccionado en la mesa de laboratorio, con su exterior de goma de silicona extendido como una piel de serpiente que se exhibe como trofeo. Unos finos alambres atraviesan en zig-zag el interior de su pálida carne artificial. Barry Trimmer le da a un pequeño interruptor y los muelles se contraen haciendo que la silicona se frunza; se podría decir que la piel se le eriza. Y la mía también. “Es muy orgánico”, afirma Trimmer con una sonrisa. Por lo visto, “orgánico” es un eufemismo técnico para “asqueroso”. Pero es inquietantemente natural, y de eso se trata.
Continúa:
Los robots, tema de la ciencia ficción en el pasado, están por todas partes. Geólogos robóticos se pasean por Marte, pequeñas aspiradoras Roomba succionan el polvo en casa. Pero la mayoría de los robots están fabricados con componentes rígidos y no se parecen demasiado a las criaturas que nos rodean. En la Tufts University, en Medford. Massachusetts, un equipo multidisciplinar de investigadores busca darle un enfoque más blando. El proyecto Biomimetic Technologies for Soft-bodied Robots [Tecnologías Biomiméticas para Robots de Cuerpo Blando] intenta desarrollar un gusano que se mueva casi de la misma manera que los reales.
Los investigadores ven el potencial de usar creaciones relativamente simples para encontrar minas terrestres, reparar maquinaria en lugares de difícil acceso e incluso diagnosticar y tratar enfermedades. Este proyecto, surgido del creciente interés por la robótica que imita a la vida, es una colaboración entre siete miembros de cinco departamentos distintos de las facultades de varias ingenierías,artes y ciencias de Tufts.
Trimmer procede del campo de la neurobiología, y lleva estudiando al gusano Goliat (Manduca sexta) desde 1990. Le fascina el modo en que una criatura aparentemente tan simple como el gusano del tabaco (que, para confusión de todo hijo de vecino, no es un gusano sino una oruga) retuerce su cuerpo en casi cualquier dirección y trepa por las ramas de los árboles.
“¿Cómo haces que una máquina se mueva con esa versatilidad y destreza?”, pregunta Trimmer. El problema del movimiento en los robots convencionales es que las articulaciones rígidas lo dificultan y restringen su variedad. “Cada articulación añade problemas exponenciales de control”,explica. El brazo multiarticulado de la lanzadera espacial, por ejemplo, puede colocar cámaras, material y astronautas en una sorprendente diversidad de posiciones, pero el proceso de planear cada movimiento es extremadamente complejo. No obstante, apuntan los investigadores de Tufts, una oruga no necesita entrenarse antes de empezar a arrastrarse por una hoja.
Extirpémosle al gusano del tabaco su diminuto cerebro, y seguirá moviéndose. Trimmer piensa que gran parte del secreto de la locomoción de una oruga es inherente a los músculos y al cuerpo. El gusano Goliat solamente tiene 70 músculos por cada segmento, con un único nervio controlando cada músculo en la mayoría de los casos. Los investigadores sospechan que esta locomoción de la oruga, que maravilla por su flexibilidad, puede surgir de manera natural a partir de reglas relativamente sencillas.
Los investigadores están buscando una elegancia similar en sus creaciones. Las criaturas iniciales son tubos huecos. Los “músculos” son muelles de alambre hechos de una aleación capaz de recordar su forma original. Una corriente eléctrica calienta los muelles haciendo que se contraigan; cuando la corriente se detiene, la piel elástica devuelve el alambre a su forma originaria de reposo. “La sencillez del diseño es casi infantil”, asegura Trimmer.
Los científicos han conseguido que se propague una onda a través del cuerpo de un robot; esa onda se transmite a los pies para que éstos se muevan como los pies de una oruga de verdad. Según Trimmer, a finales de año esperan tener robots capaces de moverse emulando a las orugas.
El dar con un código electrónico que coordine los movimientos se acelerará enormemente gracias al rápido sistema de ensayo y error que en el mundo de la informática recibe el nombre de algoritmos genéticos. Los investigadores de Tufts participan en una de las grandes tendencias en los estudios de robótica y locomoción, cada vez más inspirados en el mundo de la biología.
Joseph Ayers, de la Northeastern University, en Boston, ha creado una langosta artificial. Ian Walker, de la Clemson University, en Carolina del Sur, tiene un brazo robótico inspirado en la trompa de los elefantes y en el brazo de los pulpos. Hay salamandras, serpientes, cucarachas, peces y gecos robóticos. “Es un tema de plena actualidad”, afirma Auke Jan Ijspeert, jefe del Grupo de Robótica Inspirada en la Biología en el Instituto Federak Suizo de Tecnología.
Ijspeert creó la salamandra robótica como una manera de demostrar las teorías ’73obre el modo de retorcerse de la salamandra de verdad. “Básicamente, me asombra la naturaleza”, confiesa, “y la forma en que esos impresionantes animales resuelven el problema del control de la locomoción”.
La evolución, el motor del desarrollo, es brillante, pero no necesariamente eficiente, mantiene Ijspeert. “La solución biológica siempre resulta un poco desordenada, se basa en sistemas anteriores”, explica. Según él, si un investigador trabaja libre de precedentes, puede llegar a dar con una solución más elegante que la de la propia naturaleza.
Trimmer aseguraba tener “una gran confianza en que funcione”. Y además, añade, “si no hacemos exactamente el robot del que estamos hablando, ¿qué es lo que tenemos? Lo que tenemos es un enfoque completamente nuevo del control del movimiento”, concluye el investigador.
Volver inicio ricardoroman.cl